Genel Özellikler
RoArm-M2 serisi, yenilikçi uygulamalar için tasarlanmış 4DOF akıllı robotik bir koldur. 900 g'dan daha az toplam ağırlığa ve 0,5 kg @ 0,5 m'lik etkili yük kapasitesine sahip hafif yapı tasarımını benimser, çeşitli mobil platformlara esnek bir şekilde monte edilebilir. 1 metre çapında bir çalışma alanı oluşturmak için üç esnek eklemle birleştirilmiş 360° çok yönlü bir taban benimser.
Ortak direct-drive tasarımı yeniden konumlandırma hassasiyetini artırır ve ayrıca omuz eklem torkunu iki katına çıkaran yenilikçi dual-drive teknolojisiyle yapısal güvenilirliği iyileştirir. Yerleşik ESP32 MCU ana kontrol modülü birden fazla kablosuz kontrol modunu destekler, çeşitli cihazlara kolayca bağlanmak için kontrol arayüzleri ve zengin iletişim protokolleri sağlar.
Basit ve görselleştirilmiş bir koordinat kontrol modunu entegre eden, kullanıcı dostu ve platformlar arası bir WEB uygulaması sunar ve bu da başlamayı kolaylaştırır. Öğrenmenize ve hızlı bir şekilde kullanmanıza yardımcı olmak için zengin grafik ve video eğitimleriyle birlikte gelir. ROS2 ve çeşitli ana bilgisayarlarla uyumludur, çeşitli kablosuz ve kablolu iletişim modlarını destekler. Genişletme plakasıyla birlikte gelir, yenilikçi uygulama gereksinimlerini karşılamak için EoAT'yi (Kolun Sonu Takımı) özelleştirmeyi destekler.
RoArm-M2 serisi, hafiflik, kullanıcı dostu olma, genişletilebilirlik ve açık inovasyon arasında mükemmel bir denge sağlar, akıllı kontrol, insan-makine etkileşimi ve özelleştirilebilir geliştirmeyi entegre eden çok işlevli bir robotik koldur. Esneklik, genişletilebilirlik ve kullanıcı dostu olma kombinasyonunu gerektiren uygulamalar için idealdir.
Sürüm Seçenekleri
RoArm-M2-S / RoArm-M2-Pro için seçenekler sunar. Yükseltilmiş versiyon RoArm-M2-Pro, tamamen metal ST3235 veri yolu servolarıyla donatılmıştır ve kullanımla artmayacak daha sağlam bir gövde ve kararlı bir boşluk sunarak ürünün dayanıklılığını artırır.

Parametre Karşılaştırması
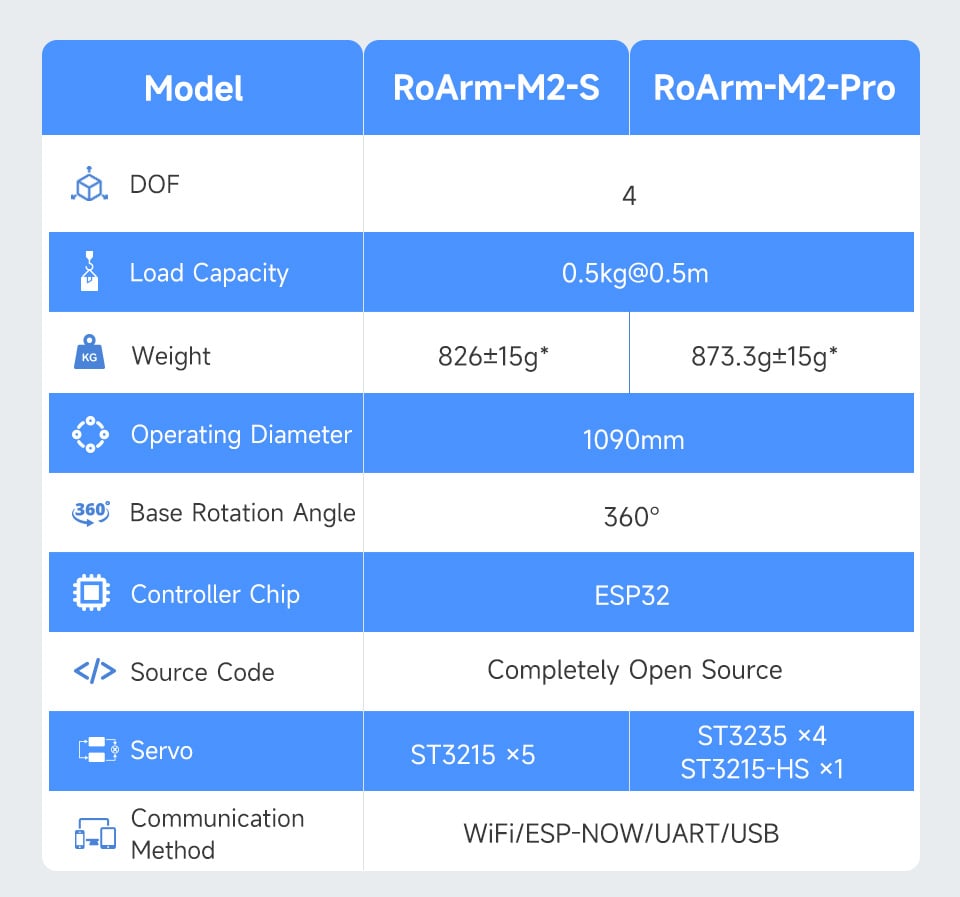
*Masa kenarı sabitleme kelepçesinin ağırlığı (290 gr) dahil değildir.
Çoklu EoAT Montaj Yöntemleri
EoAT çeşitli montaj yöntemlerini destekler, kelepçe veya dördüncü serbestlik derecesi olarak kullanılabilir. DIY ve ikincil geliştirme için Açık kaynaklı DXF ve 3D modeller sağlar.
Esnek Eklemler × Çok Yönlü Alan
1 metre çapında çok yönlü bir çalışma alanı yaratmak için 360° dönüşlü taban ve esnek eklemler kullanır ve EoAT'nin her yöne serbestçe hareket etmesini sağlar
Çapraz Platform Web Uygulaması Aracılığıyla Kontrolü Kolaydır
Uygulama kurulumu gerekmez, adresi girdikten sonra erişim. Kullanıcıların Web Uygulaması'ndaki düğmelere tıklayarak mobil telefonlar, tabletler ve bilgisayarlar aracılığıyla RoArm-M2'ye bağlanmasını ve kontrol etmesini sağlar. Kullanıcı arayüzünü özelleştirmek ve yeni işlevler eklemek için bu açık kaynaklı Web Uygulamasının ikincil gelişimini destekler.
İkincil Geliştirme İçin Tamamen Açık Kaynaklı
Roarm-M2 serisinin kontrol kodları ve iletişim arayüzü belgeleri için tamamen açık kaynaklıdır, ikincil geliştirme için birden fazla dili ve cihazı destekler. Sıfır tabanlı kullanıcılar için modülerleştirilmiş demolar ve eğitimler sağlar, başlaması kolaydır.
Hafif Gövde, Mükemmel Yük Kapasitesi
900g'dan daha az toplam ağırlığa sahip hafif gövde,
ağır yükler altında stabiliteyi sağlamak için karbon fiber ve 5052 alüminyum alaşımı kullanır,
çeşitli mobil robot şasileri için uygundur.

Ortak Doğrudan Tahrik Tasarımı
Geribildirim hassasiyeti 0,088°'ye kadar
Eklem açısı geri bildirimi, herhangi bir indirgeme grubuna ihtiyaç duymadan, daha doğru olan 12 bitlik yüksek hassasiyetli manyetik kodlayıcı aracılığıyla doğrudan elde edilebilir ve mevcut hedef noktasının gerçek konumu, eklem açısı geri bildirimine dayanarak hesaplanabilir.
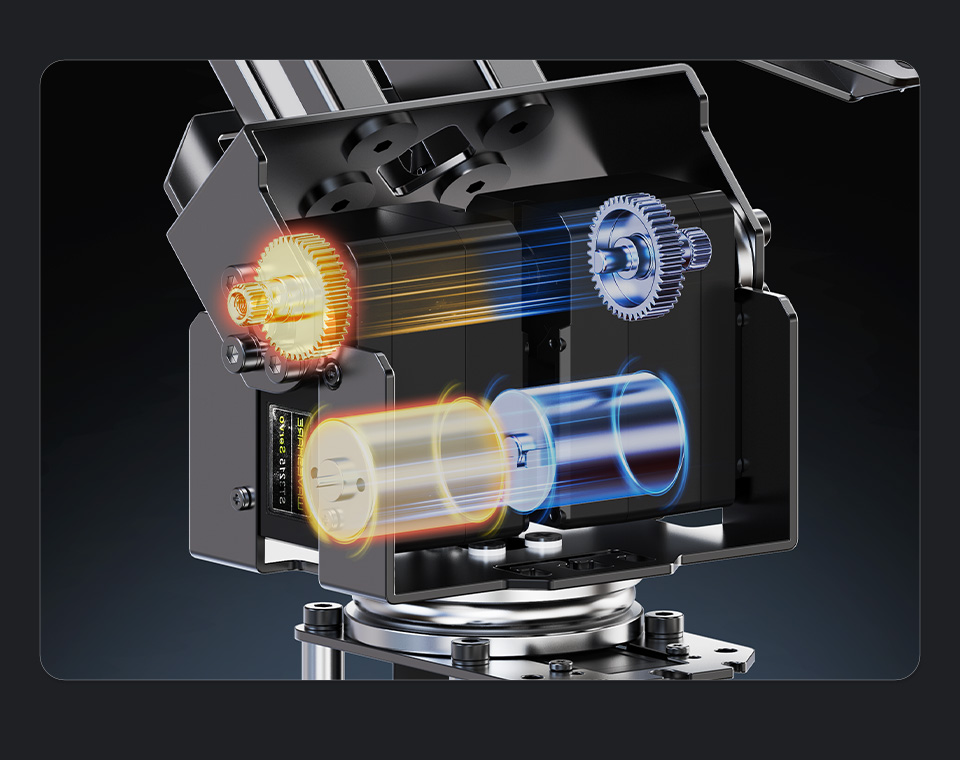
Yenilikçi Dual-Drive Teknolojisi Omuz Eklemi Torkunu İki Katına Çıkarır
Omuz eklemindeki iki servonun çıkış torkunu etkili bir şekilde koordine etmesini sağlayan çift tahrikli bir kontrol algoritması geliştirdik; bu sayede
RoArm-M2 Serisinin gücü ve genel yük kapasitesi önemli ölçüde artırıldı.
Direct-Drive Kelepçe Hassas Kuvvet Kontrolü Sağlar
Doğrudan tahrikli kelepçe tasarımı, programda kelepçe kuvvetinin hassas bir şekilde kontrol edilmesini sağlar ve aşırı kuvvet uygulamadan hassas nesneleri sıkıştırmak için uygundur.
Yer Çekiminin Etkisini Telafi Etmek İçin Lastik Bantların Takılmasını Destekler
OMUZ ve DİRSEK eklemleri, lastik bantların elastik büzülmesinden yararlanarak yerçekiminin etkisini telafi etmek ve robot kolunun etkin yükünü artırmak suretiyle robot koluna yardımcı olmak için lastik bantların takılmasını destekler.
Dinamik Dış Kuvvete Adaptif Kontrol
Bu işlevi etkinleştirdikten sonra, her eklem için maksimum torku sınırlayabilirsiniz. Ekleme uygulanan dış kuvvet tork eşiğini (yapılandırılabilir) aştığında, robotik kol dış kuvvete yanıt olarak dönecek ve dış kuvvet tork eşiğinin altına düştüğünde belirtilen konuma geri dönecektir.

Tek Tıklamayla Otomatik Kayıt İşlemleri Kolayca Oluşturma
RoArm-M2, robot kontrolü için JSON talimatlarını görev dosyaları olarak kaydedebilir. Görev dosyaları, güç kaybı durumunda kaybolmayacak olan ESP32'nin Flash'ına kaydedilebilir. Robotik kol, bu görev dosyalarını çağırarak karmaşık ve tekrarlayan işlemler gerçekleştirebilir.
Koordinatları Girerek Hedefe Doğru Bir Şekilde Ulaşın
Üç boyutlu Kartezyen koordinat sisteminde ters kinematik kontrol algoritması için açık kaynak. Hedef pozisyonu girdikten sonra, robot kolu her bir eklemin dönüş açısını hesaplamak için ters kinematik fonksiyonunu kullanarak hedef noktaya doğru bir şekilde ulaşabilir.
Daha Pürüzsüz Hareket İçin Eğri Hız Kontrolü
Robotik kolun başlatma ve durdurma sırasında salınımlar olmadan daha yumuşak ve daha doğal hareket etmesini sağlamak için eğri hız kontrol algoritmasını kullanıyoruz
ESP-NOW Kablosuz Kontrolü
Düşük gecikmeli uzaktan işbirliği
ESP-NOW, Ağ altyapılarına ihtiyaç duymadan düşük gecikmeli bir ad hoc kablosuz iletişim protokolüdür. Bir robotik kolu diğer robotik kolları kablosuz olarak kontrol etmek için kullanabilirsiniz ve kontrol yöntemleri yayın kontrolü, grup kontrolü ve bire bir kontrol olarak ayarlanabilir.
* Not: Yayın denetiminin kontrol edilen cihaz sayısı için bir sınırlaması yoktur, ancak grup denetimi 20 cihaza kadar izin verir. Daha fazla ayrıntı için lütfen Kaynaklara bakın.
ESP-NOW'a dayalı Lider-takip kontrol modunu destekler
Lider-takip eden kontrol modunda, Lider robot kolu eklem açısı bilgisini ESP-NOW iletişimi aracılığıyla diğer robot kollarına gönderecektir. ESP-NOW Takipçi modunda olan diğer robot kolları gerçek zamanlı olarak Lider ile aynı eylemleri taklit edecektir.
Birden Fazla Kontrol Arayüz, Birden Fazla Cihaz ve Dil Desteği
RoArm-M2 serisi sadece WEB uygulamasıyla kontrol edilmiyor, aynı zamanda HTTP protokol ağ isteği, seri iletişim veya USB iletişimi yoluyla JSON komutları göndermek için diğer denetleyicilerin kullanılmasını da destekliyor ve geri bildirimi kontrol edip alabiliyor.
Uygulamanıza Entegre Etmek için Çoklu Kurulum Yöntemleri
Farklı kullanım senaryolarına uygun, projelerinize ve uygulamalarınıza esnek bir şekilde entegre edilebilen birden fazla kurulum şeması ve ilgili ikincil geliştirme kaynakları sağlar.

Farklı çevre birimlerini kurmak kolaydır
Üst kolun ana yapısı iki adet 1020 Avrupa standardı alüminyum raydan oluşur, farklı ihtiyaçları karşılamak için tekne somunları aracılığıyla ek çevre birimlerinin takılmasını destekler. Kolay kurulum için tekne somunları ve karşılık gelen M4 vidalarla birlikte gelir.
Görsel uygulamaları genişletmek için bir kameranın kurulumunu destekler
Bir kamera tutucu ve ilgili çizimler için açık kaynak ile birlikte gelir. Doğrudan karşılık gelen boyutta bir kamera veya bir adaptörle
diğer kameraları kurabilirsiniz
Daha fazla işlev için farklı EoAT'lerin genişletilmesini destekler
Genişletme plakasıyla birlikte gelir, kullanıcıların
daha fazla işlev için farklı EoAT'leri genişletmesi ve değiştirmesi kolaydır
Yerleşik ESP32 Ana kontrol kartı
ESP32 güçlü ana kontrol MCU'sunu benimser, yenilikçi uygulamaların ikincil gelişimine yardımcı olmak için çok sayıda açık kaynak kaynağıyla birden fazla kablosuz iletişim protokolünü destekler
ROS2 ile uyumludur,
Model kurulum Dosyası sağlar ve çoklu cihaz işbirliğini destekler
ROS2'nin iletişim düğümlerini, URDF model açıklama dosyasını ve ROS2'nin sıfır tabanlı eğitimini sağlar.
İkincil gelişim için zengin öğretici kaynaklar
Kullanıcıların ikincil geliştirmeye hızlı bir şekilde başlamalarına yardımcı olmak için çeşitli işlevler ve genel uygulama senaryoları da dahil olmak üzere eksiksiz birim eğitimleri ve vaka örnekleri sağlıyoruz
Robotlar için Genel Sürücü Kartı
Yenilikçi geliştirme ve işlevsel genişleme için zengin arayüzler ve kaynaklar.
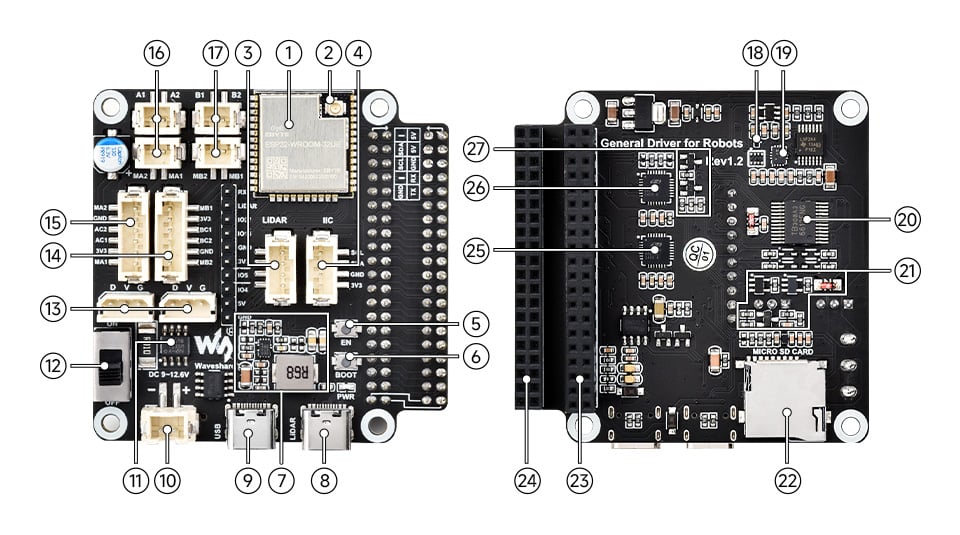
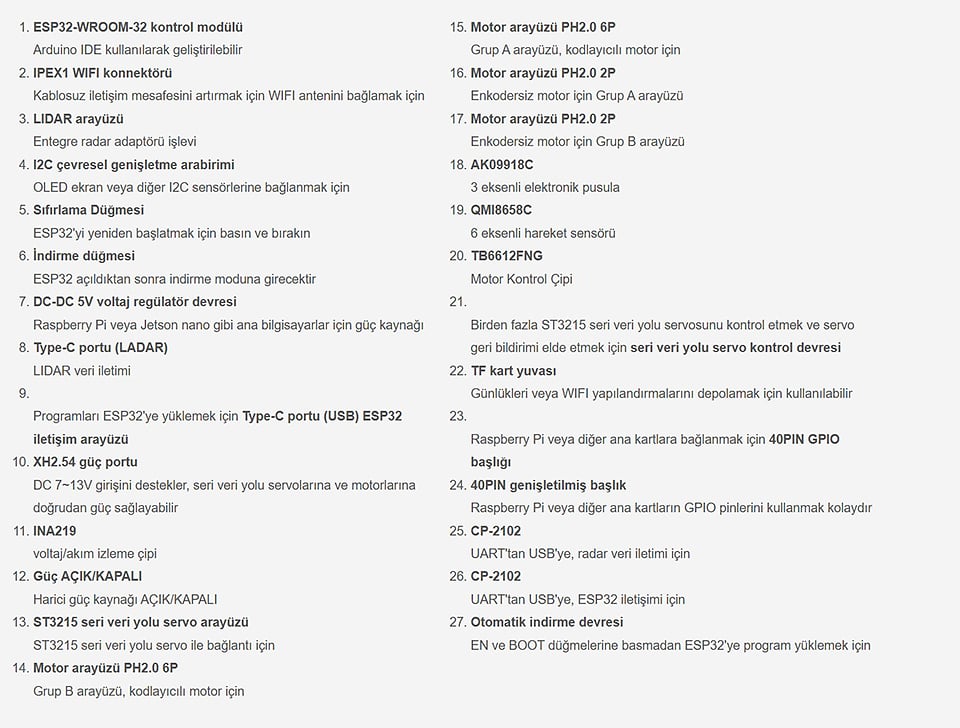
Çeşitlendirilmiş yerleşik kaynaklar
Fonksiyon genişlemesini destekler
Entegre TB6612FNG motor sürücü IC, INA219 pil voltaj izleme ve 9 eksenli
IMU sensörü, fonksiyon genişlemesini ve yeniliği destekler
Fare sürükleyip bırakma etkileşimi
Web uygulamaları ve masaüstü yazılımları (Python tarafından geliştirilen açık kaynaklı programlar) sağlar, fareye basıldığında ve bırakıldığında
robotik kolu esnek bir şekilde kontrol etmek için eylem talimatlarının ayarlanmasını destekler.
Kaynaklar ve Hizmetler
Özellikler
Serbestlik derecesi: 4
Çalışma alanı Yatay çap: 1090mm (Maks., 360° çok yönlü), Dikey: 798mm (Maks.)
Çalışma voltajı: 12V 5A güç kaynağı, 3S Lityum pilleri destekler (DAHİL DEĞİLDİR)
Yük kapasitesi: 0,5kg @ 0,5m
Yeniden konumlandırma hassasiyeti: ≈±4mm (aynı yük altında)
Servo dönüş hızı: 40rpm (yüksüz, tork sınırı yok)
Çalışma aralığı: TABAN-360°, OMUZ-180°, DİRSEK-180°, EL-135°/270°
Sürücü tipi: TTL Seri veri yolu servosu, doğrudan tahrikli bağlantı
Servo numaraları: 5
Eklem açısı sensörü: 12 bit 360° manyetik kodlayıcı
Servo torku: 30KG.CM @12V
Ortak geri bildirim bilgileri: servo durumu, eklem açısı, dönüş hızı, eklem yükü, servo voltajı, servo akımı, servo sıcaklığı ve servo çalışma modu.
Ana kontrol: ESP32-KÖTÜ-32
Ana kontrol modülü özellikleri: WiFi, BT, Çift Çekirdek, 240MHz
Kablosuz kontrol modu: 2.4G-WiFi, ESP-ŞİMDİ
Kablolu kontrol modu: USB, UART
Manuel çalışma modu: WEB kontrol arayüzü
Ana bilgisayar çalışma modu: JSON veri biçimi komutları aracılığıyla UART/USB/ESP-NOW*/HTTP iletişimi (* ESP-NOW iletişimi kullanılıyorsa geri bildirim bilgisinin alınmasını desteklemez)
Ana bilgisayar desteği: Raspberry Pi, Jetson Orin Nano ve PC gibi USB bağlantı cihazları.
EoAT işlevi: varsayılan olarak kelepçe işlevi, ek bir serbestlik derecesi olarak değiştirilebilir
LED güç: ≤1,5W
OLED ekran boyutu: 0,91 inç
Diğer işlevler: 2 kanallı 12V güç kaynağı anahtarı, 9-DOF IMU
Robotik kol ağırlığı: RoArm-M2-S: 826 ±15g
RoArm-M2-Pro: 873,3 ±15g (masa kenarı sabitleme kelepçesi hariç)
Masa kenarı sabitleme kelepçesi ağırlığı: 290 gr ±10 gr
Kelepçenin desteklenen masa kenarı kalınlığı: <72mm
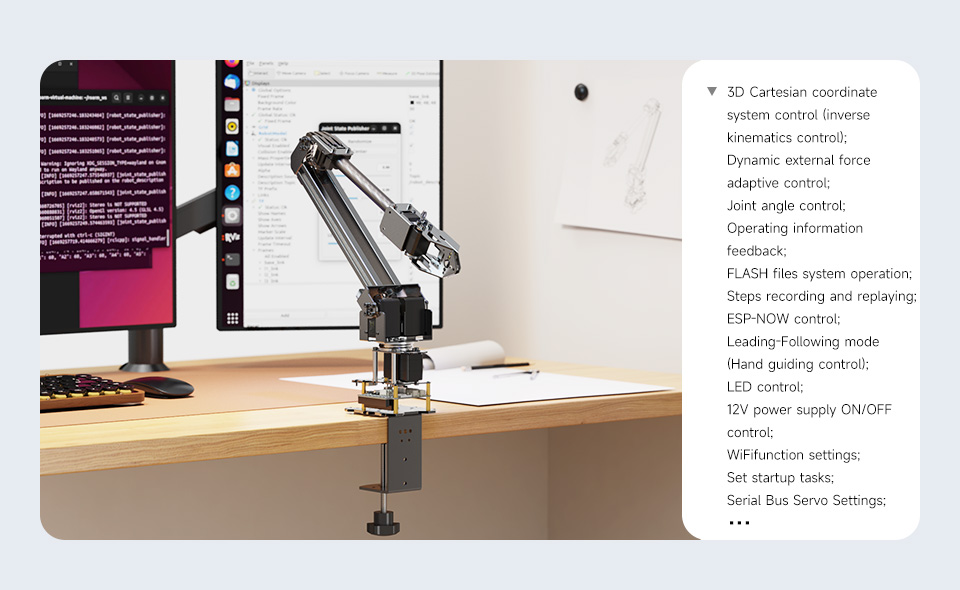
Demo: 3D Kartezyen koordinat sistemi kontrolü (ters kinematik kontrolü); Dinamik dış kuvvet uyarlamalı kontrol; Eklem açısı kontrolü; Çalışma bilgisi geri bildirimi; FLASH dosyaları sistem çalışması; Adım kaydı ve tekrarı; ESP-NOW kontrolü; Önderlik-İzleme modu (El rehberliği kontrolü); LED kontrolü; 12V güç kaynağı AÇIK/KAPALI kontrolü; WiFi işlev ayarları; Başlangıç görevlerini ayarlama; Seri veri yolu servo ayarları; Geri bildirim modu ayarı; EoAT modu ayarı, vb. (Not: Daha fazla ayrıntı için lütfen kaynaklara bakın)